Во многих станках применяют электромоторы (ЭМ) постоянного тока. Они легко позволяют плавно управлять частотой вращения, изменяя постоянную составляющую напряжения на якорной обмотке, при постоянном напряжении обмотки возбуждения (0В).
Предлагаемая ниже схема позволяет управлять электромотором мощностью до 5 кВт.
Мощные ЭМ постоянного тока имеют несколько особенностей, которые необходимо учитывать:
а) нельзя подавать напряжение на якорь ЭМ без подачи номинального напряжения (обычно 180...220 В) на обмотку возбуждения;
б) чтобы не повредить мотор, недопустимо сразу подавать при включении номинальное напряжение на якорную обмотку, из-за большого пускового тока, превышающего номинальный рабочий в десятки раз.
Приведенная схема позволяет обеспечить необходимый режим работы - плавный запуск и ручную установку нужной частоты вращения ЭМ.
Направление вращения изменится, если поменять полярность подключения проводов на обмотке возбуждения или якоре (делается это обязательно только при выключенном ЭМ).
В схеме применены два реле, что позволяет выполнить автоматическую защиту элементов схемы от перегрузки. Реле К1 является мощным пускателем, оно исключает вероятность включения ЭМ при установленной резистором R1 не нулевой начальной скорости. Для этого на оси переменного резистора R1 закрепляется рычаг, связанный с кнопкой SB2, которая замыкается (рычагом) только при максимальном значении сопротивления (R1) - это соответствует нулевой скорости.
Когда замкнуты контакты SB2, реле К1 при нажатии кнопки ПУСК (SB1) включится и своими контактами К1.1 самоблокируется, а контакты К1.2 включат электропривод.
Реле К2 обеспечивает защиту от перегрузки при отсутствии тока в цепи обмотки возбуждения ЭМ. В этом случае контакты К2.1 отключат питание схемы.
Питается схема управления без трансформатора, непосредственно от сети через резистор R3.
Величина действующего значения напряжения на якорной обмотке устанавливается с помощью изменения резистором R1 угла открывания тиристоров VS1 и VS2. Тиристоры включены в плечи моста, что уменьшает число силовых элементов в схеме.
На однопереходном транзисторе VT2 собран генератор импульсов, синхронизированных с периодом пульсации сетевого напряжения. Транзистор VT1 усиливает импульсы по току, и через разделительный трансформатор Т1 они поступают на управляющие выводы тиристоров.
При выполнении конструкции тиристоры VS1, VS2 и диоды VD5, VD6 необходимо установить на теплоотводящую пластину (радиатор).
Часть схемы управления, выделенная на рисунке пунктиром, размещается на печатной плате.
Постоянные резисторы применены типа С2-23, переменный R1 - типа ППБ-15Т, R7 - СП--196, R3 - типа ПЭВ-25. Конденсаторы С1 и С2 любого типа, на рабочее напряжение не менее 100 В. Выпрямительные диоды VD1 ...VD4 на ток 10 А и обратное напряжение 300 В, например Д231 Д231А Д232,Д232А,Д245,Д246.
Импульсный трансформатор Т1 выполнен на ферритовом кольце М2000НМ типоразмера К20х12х6 мм и намотан проводом ПЭЛШО диаметром 0,18 мм. Обмотка 1 и 2 содержат по 50 витков, а 3 - 80 витков.
Перед намоткой, острые грани сердечника нужно закруглить надфилем, чтобы исключить продавливание и замыкание витков.
При первоначальном включении схемы замеряем ток в цепи обмотки возбуждения (0В) и по закону Ома рассчитываем номинал резистора R2 так, чтобы срабатывало реле К2. Реле К2 может быть любым низковольтным (6...9 В) - чем меньше напряжение срабатывания, тем лучше. При выборе резистора R2 необходимо учитывать также рассеиваемую на нем мощность. -ная ток в цепи 0В и напряжение на резисторе, ее легко посчитать по формуле P=UI. Вместо К2 и R2 лучше применять выпускаемые промышленностью специальные токовые реле, но они из-за узкой области применения не всем доступны. Токовое реле несложно изготовить самостоятельно, намотав на большем герконе примерно 20 витков проводом ПЭЛ диаметром 0.7...1 мм.
Для настройки схемы управления вместо якорной цепи мотора подключаем лампу мощностью 300...500 Вт и вольтметр. Необходимо убедиться в плавном изменении напряжения на лампе резистором R1 от нуля до максимума,
Иногда, из-за разброса параметров однопереходного транзистора, может потребоваться подбор номинала конденсатора С2 (от 0,1 до 0,68 мкФ) и резистора R7 (R7 устанавливает при минимальном значении сопротивления R1 максимум напряжения на нагрузке).
Если при правильном монтаже не открываются тиристоры, то необходимо поменять местами выводы во вторичных обмотках Т1. Неправильная фазировка управляющего напряжения, приходящего на тиристоры VS1 и VS2, не может их повредить. Для удобства контроля работы тиристоров управляющее напряжение допустимо подавать сначала на один тиристор, а потом на другой - если регулируется резистором R1 напряжение на нагрузке (лампе), фаза подключения импульсов управления правильная. При работе обоих тиристоров и настроенной схеме напряжение на нагрузке должно меняться от 0 до 190 В.
Исключить вероятность подачи максимального напряжения на якорную обмотку в момент включения можно и электронным способом, воспользовавшись схемой, аналогичной приведенной на рис 6.17. (Конденсатор С2 обеспечивает плавное нарастание выходного напряжения в момент включения, а в дальнейшем на работе схемы не сказывается.) В этом случае включатель SB2 не нужен
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя - один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк.
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.

Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо - Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
![]()
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) - нормально-разомкнутого типа;
- СОМ (Соmmоn) - общего типа;
- NС (Nоrmаlly сlоsеd) - нормально-замкнутого типа.

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
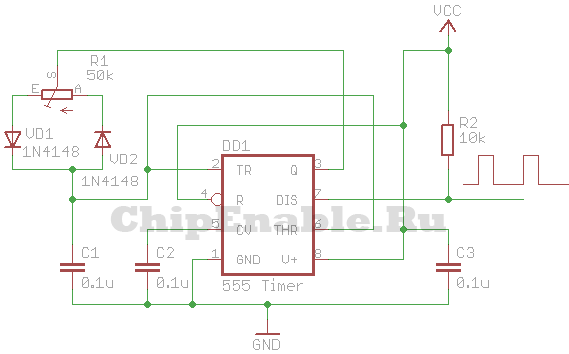
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
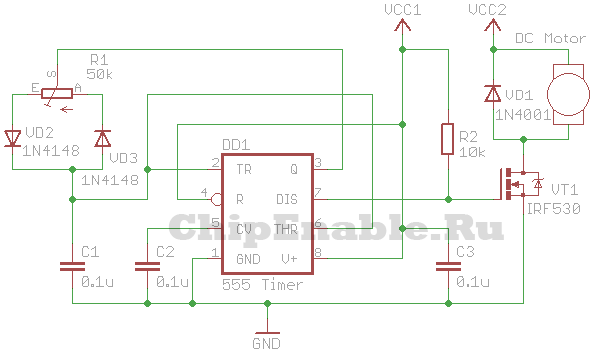
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Схема пуска двигателя постоянного тока с независимым возбуждением по принципу времени
Эта схема представлена на рис. 1.1, а . Она содержит кнопки управления SB 1 (пуск) и SB 2 (останов) двигателя, линейный контактор КМ 1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ 2 для шунтирования пускового резистора R д. В качестве датчика времени в схеме используется электромагнитное реле времени КТ . При подключении схемы к источнику напряжения U происходит возбуждение двигателя и срабатывает реле КТ , размыкая свой размыкающий контакт в цепи катушки контактора КМ 2 и подготавливая двигатель к пуску.
Рис. 1.1. Схема пуска двигателя по принципу времени (а ), характеристики двигателя (б) и кривые переходного процесса (в)
Пуск двигателя начинается после нажатия кнопки S В1, в результате чего получает питание контактор КМ 1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором R д в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ 1 шунтирует кнопку S В1, и она может быть отпущена, а размыкающий блок-контакт КМ 1 разрывает цепь питания катушки реле времени КТ. Через интервал времени Δt к.т после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ 2, последний включится и главным контактом закоротит пусковой резистор R д в цепи якоря. Таким образом, при пуске двигатель в течение времени Δt к.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), а после шунтирования резистора R д – по естественной 2 . Значение сопротивления резистора R д выбирается таким образом, чтобы в момент включения двигателя ток I 1 в цепи и соответственно момент М 1 , не превосходили бы допустимого уровня.
За время Δt к.т после начала пуска частота вращения двигателя достигает значения ω 1 , а ток в цепи якоря снижается до уровня I 2 (рис. 1, в). После шунтирования R д, происходит бросок тока в цепи якоря от I 2 до I 1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте.
Останов двигателя осуществляется нажатием кнопки S В 2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
Схема пуска двигателя в две ступени по принципу ЭДС и динамического торможения по принципу времени.
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ 1 и КМ 2, обеспечивающих шунтирование пусковых резисторов R д1 и R д2 . С помощью регулировочных резисторов R у1 , и R у2 , которые могут быть настроены на срабатывание при определенных частотах вращения двигателя.

Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б )
Для осуществления торможения в схеме предусмотрен резистор R 3 , подключение и отключение которого осуществляется контактором торможения КМ З. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ 2.
После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки S В 1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами R д1 + R д2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ 1 и КМ 2. При частоте вращения ω 1 срабатывает контактор КМ 1, закорачивая своим контактом первую ступень пускового резистора R д1, и двигатель переходит на характеристику 2 . При частоте вращения ω 2 срабатывает контактор КМ 2,шунтируя своим контактом вторую ступень пускового резистора R д2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ω с – М с, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки.
Для перехода к режиму торможения нажимается кнопка SB 2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ 3 замыкается, последний срабатывает и своим главным контактом подключает резистор R д3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б ). Одновременно размыкается замыкающий контакт контактора КМ в цепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМ З. Резистор R д3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение.
Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Схема пуска двигателя в одну ступень по принципу времени и динамического торможения по принципу ЭДС.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ 2 разомкнут, что предотвращает перевод двигателя в режим торможения.

Рис. 1.3. Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС
Торможение осуществляется нажатием кнопки S В2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ 2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения R д1 . Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ 2, который отключится, и схема вернется в исходное положение.
Схема управления пуском двигателя по принципу времени, реверсом и торможением противовключением по принципу ЭДС
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ 1 и КМ 2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора R д1 включен резистор противовключения R д2 , который управляется контактором противовключения КМ З.

Рис. 1.4. Схема управления пуском и реверсом двигателя (а ) и характеристики двигателя (б)
Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения К V 1 и К V 2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору R д1 , резистор противовключения R д2 , что достигается выбором точки присоединения катушек реле К V 1 и К V 2 к резистору (R д1 + R д2).
Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки S В 1 срабатывает контактор КМ 1 и подключает якорь М к источнику питания. За счет падения напряжения на резисторе R д1 , от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ.
Включение КМ 1 приведет также к срабатыванию реле К V 1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМ З. Это вызовет включение КМ З, что приведет к закорачиванию ненужного при пуске резистора противовключения R д2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ – отсчет выдержки времени.
По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор R д1 и двигатель выйдет на свою естественную характеристику 1.
Для осуществления торможения нажимается кнопка S В 2, в результате чего отключаются контактор КМ 1, реле К V 1, контакторы КМ З и КМ 4 и включается контактор КМ 2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря R д1 и R д2 . Несмотря на замыкание контакта КМ 2 в цепи реле К V 2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМ З и КМ 4 и зашунтировать резисторы R д1 и R д2 .
Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0 < ω < ω 0 на этой характеристике двигатель работает в режиме противовключения.
По мере снижения частоты вращения двигателя растет напряжение на катушке реле К V 2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка S В 2 будет отпущена, то отключается контактор КМ 2, схема возвращается в исходное положение и на этом процесс торможения заканчивается.
Если же при достижении малой частоты вращения кнопка S В 2 остается нажатой, то включается реле К V 2 и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора R д1 .
Схема пуска двигателя постоянного тока с последовательным возбуждением по принципу тока
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ 2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I 2 (см. рис. 1.1, б). В схеме используется также дополнительное блокировочное реле К V с временем срабатывания большим, чем у реле КА.

Рис. 1.5. Схема пуска двигателя по принципу тока
Работа схемы при пуске происходит следующим образом. После нажатия на кнопку S В 1 срабатывает контактор КМ 1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ 1 вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ 2. Через некоторое время после этого срабатывает К V и замыкает свой замыкающий контакт в цепи контактора КМ 2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I 2 . При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ 2. Последний срабатывает, его главный контакт закорачивает пусковой резистор R д, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания R д и броска тока не вызовет отключения контактора КМ 2 и двигатель продолжит разбег по своей естественной характеристике.
Схема типовой панели управления двигателем, обеспечивающая пуск, динамическое торможение и регулирование частоты вращения ослаблением магнитного потока
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6).

Рис. 1.6. Схема типовой панели управления двигателем
Органом управления в этой схеме является командоконтроллер S А, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС.
Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF 1 и QF 2 и ЭП подключается к источнику питания. По обмотке ОВ возбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ 1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА 1 и КА 2 находятся в нормальном (отключенном) положении, то срабатывает реле К V 4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле К V 4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит.
Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера S А перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ 1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТ З, сработав от падения напряжения на резисторах R д1 и R д2 , разомкнут свои контакты в цепях контакторов ускорения КМ 2 и КМ 3. Одновременно с этим включаются «экономический» контактор КМ 6 и контактор управления возбуждением КМ З, в результате чего шунтируется резистор R в и пуск двигателя происходит при полном магнитном потоке.
Через определенное время замкнется размыкающий контакт КТ 1, контактор КМ 1 включится, зашунтирует первую ступень пускового резистора R д1 и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ 2, который зашунтирует вторую ступень пускового резистора R д2 и катушку реле КТ З. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМ З и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле К V З срабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления К V 1 обеспечивается контроль за током якоря. При бросках тока реле К V 1 обеспечивает включение или отключение контактора КМ З, усиливая или ослабляя ток возбуждения, в результате чего ток в якорной цепи не выходит за допустимые пределы. При размыкании контакта КМ 5 часть тока возбуждения замыкается через диод VD и разрядный резистор R р .
Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера S А в нулевое положение. Это приводит к выключению контактора КМ и отключению якоря М от источника питания. Поскольку в процессе пуска двигателя реле динамического торможения К V 2 включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ 4 вызовет его включение. Резистор R дт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле К V 2, оно отключится, выключит контактор КМ 4 и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.
Для снижения частоты вращения двигателя рукоятка командоконтроллера S А переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторов R д2 + R д3 , а в положении 2 -на характеристике, обусловленной резистором R д3 .
Инструкции

